Applicazioni classiche nell'industria alimentare fresca--Pinza di presa molle del robot di serie di SFG-N
Descrizione di prodotto
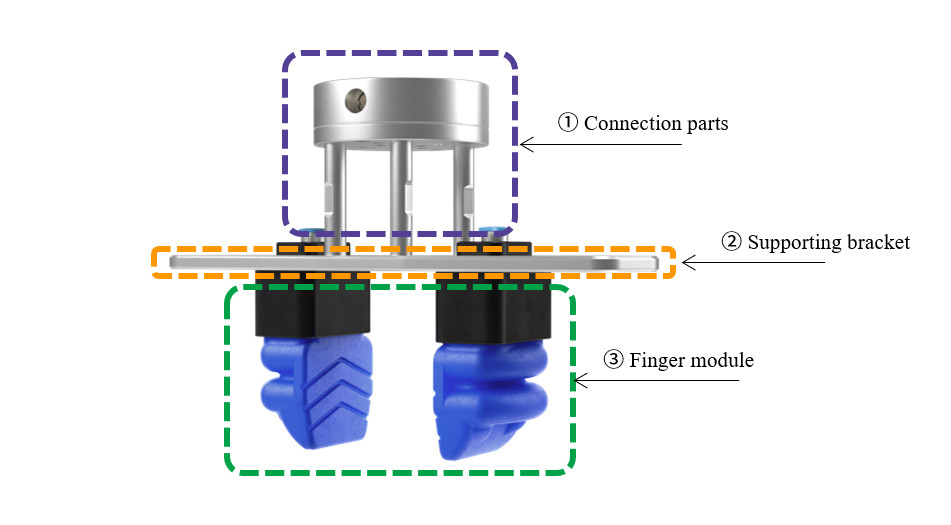
La pinza di presa molle del dito di SFG è un nuovo tipo di pinza di presa flessibile lanciato da SRT, che pricipalmente è composto di modulo del dito, di sostegno e di connettore flessibili del braccio meccanico. Il modulo flessibile del dito è la componente del centro della pinza di presa flessibile di SFG e la parte esecutiva è versata dalla gomma di silicone del commestibile, che è caratterizzata dalla buona flessibilità, dal tempo di impiego lungo e dall'alta affidabilità. La progettazione del modello del diamante si aggiunge alla superficie interna del dito, che ha il migliori attrito e resistenza nello stato di supporto doppio. Il sostegno ed il connettore sono fatti della lega di alluminio ad alta resistenza del grado di aviazione, che è leggera nel peso e nel livello nella forza e possono trattare facilmente le varie occasioni industriali. Può avvolgere con elasticità l'oggetto dell'obiettivo senza pre mettere secondo la dimensione, la forma e la durezza precise dell'oggetto. Può liberarsi dei vincoli delle linee di produzione tradizionali sui materiali ricevuti e può trattare le parti di varie dimensioni e forme.
![]()
Principi di funzionamento
La pinza di presa molle ha struttura speciale dell'airbag, producendo i movimenti differenti secondo la differenza di pressione esterna ed interna.
tende ad afferrare, copertura auto--adattabile l'interfaccia del pezzo in lavorazione e di completamento afferrando il movimento.
le pinze di presa si aprono e liberare il pezzo in lavorazione e completa afferrare sostenente interno in alcune situazioni specifiche.
![]()
![]()
![]()
Codifica dei principi
![]()
Regole di codifica del modulo del dito
![]()
Montaggio part-TC4
Tc4 è un accessorio modulare che coopera con la serie di SFG di pinza di presa flessibile e del collegamento meccanico della macchina. Lo spiegamento veloce e la sostituzione rapida dei dispositivi possono essere completati allentando meno viti.
![]()
il *The flangia dimensione della parte del montaggio del robot è compatibile con le tre dimensioni comuni in ISO9409-1: 200 (GB/T14468.1: 2004).
Montaggio del sostegno parziale sostenente
![]()
Modulo molle del dito
![]()
![]()
Parametri del prodotto
| Modello | N2020 | N2027 | N3025 | N3034 | N3043 | N3052 | N4036 | N4049 | N4062 | N4075 | N5041 | N5056 | N5072 | N5087 | N6047 | N6064 | |
| W/mm | 20 | 30 | 40 | 50 | 60 | ||||||||||||
| L/mm | 19,2 | 26,5 | 25 | 34 | 45 | 54 | 35,5 | 48,5 | 62,5 | 75 | 40,5 | 56 | 73 | 88 | 47 | 64 | |
| Ln/mm | 34,2 | 41,5 | 44 | 53,5 | 64 | 73 | 59,5 | 72,5 | 86,5 | 99 | 66 | 81,5 | 98,5 | 113,5 | 77,7 | 94,7 | |
| T/mm | 16 | 16,8 | 20,5 | 21,5 | 22 | 22 | 26,5 | 28 | 28,5 | 28,5 | 31,5 | 33,5 | 33,5 | 34 | 35,2 | 38 | |
| X/mm | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 0 | 0 | -0,5 | -0,5 | 1,5 | 1,5 | 0 | 0,5 | 0 | 0 | |
| A/mm | 22 | 22 | 30 | 30 | 30 | 30 | 40 | 40 | 40 | 40 | 48 | 48 | 48 | 48 | 53,5 | 53,5 | |
| B/mm | 16 | 16 | 19 | 19 | 19 | 19 | 24 | 24 | 24 | 24 | 27 | 27 | 27 | 27 | 30,5 | 30,5 | |
| Smax/mm | 5 | 10 | 6 | 15 | 23 | 30 | 9 | 19 | 25 | 37 | 12 | 20 | 36 | 46 | 18 | 31 | |
| Ymax/mm | 6 | 11,5 | 10 | 19 | 28 | 36 | 13 | 24 | 36 | 50 | 17 | 31 | 47 | 60 | 24 | 40 | |
| Weight/g | 18,9 | 20,6 | 40,8 | 44,3 | 48 | 52 | 74,4 | 85,5 | 96,5 | 105,5 | 104,3 | 121,2 | 140,8 | 157,8 | 158,1 | 186,6 | |
| Forza di spinta su fingertip/N | 4 | 3,8 | 8 | 7 | 5,6 | 4,6 | 12 | 11 | 8,5 | 7 | 19 | 17 | 13,5 | 11 | 26 | 25 | |
| Singolo dito coeffic- del carico ient/g |
Verticale | 200 | 180 | 370 | 300 | 185 | 150 | 560 | 500 | 375 | 300 | 710 | 670 | 600 | 500 | 750 | 750 |
| Ricoperto | 290 | 300 | 480 | 500 | 380 | 300 | 690 | 710 | 580 | 570 | 1200 | 1300 | 1100 | 1000 | 1600 | 1750 | |
| Frequenza operativa massima (CPM) | <300 | ||||||||||||||||
| Durata della vita/periodi di lavoro standard | >3,000,000 | ||||||||||||||||
| Pressione di esercizio/kPa | -60~100 | ||||||||||||||||
| Tubo dell'aria diameter/mm | 4 | 6 | |||||||||||||||
Forza di spinta di singola esposizione della prova del dito
![]()
Specificazione materiale
![]()
I nostri prodotti sono venduti in tutto il mondo. Puoi stare certo dell'intero processo dei nostri prodotti.