
|
|
Dettagli:
|
| Peso: | 543g | ||
|---|---|---|---|
| Evidenziare: | pinza di presa molle del robot del carico 2070kg,Pinza di presa molle del robot dei prodotti elettronici,pinza di presa molle di robotica del carico 2070kg |
||
Riduzione dei costi di SFG-FNC3-N4036+ ed aumento di efficienza + pinza di presa molle del robot
Riduzione dei costi di SFG-FNC3-N4036+ ed aumento di efficienza + pinza di presa molle del robot
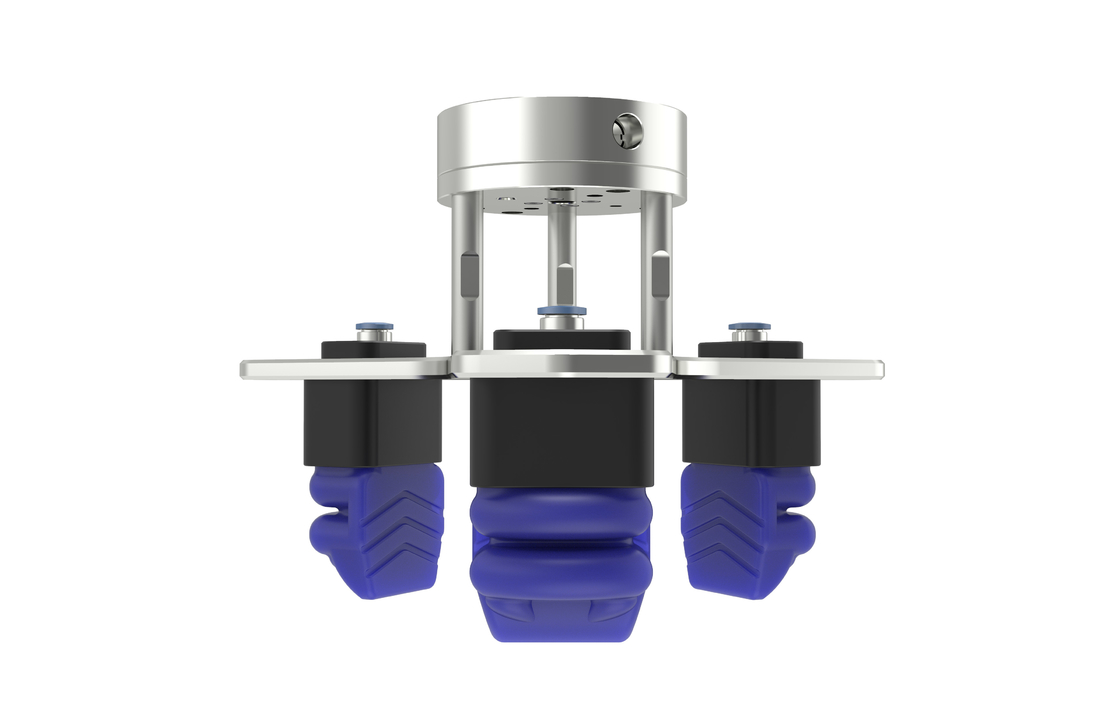
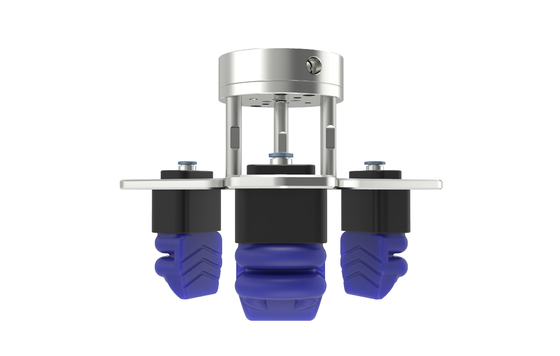
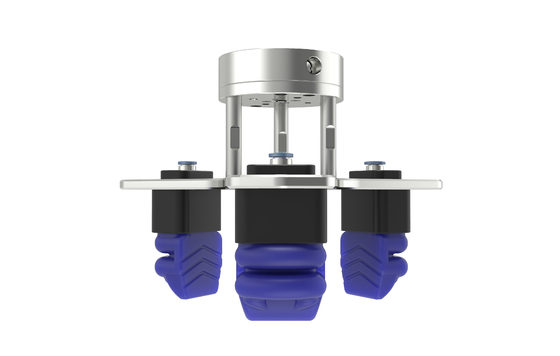
Pinza di presa molle del robot che può risolvere il problema di elaborazione automatizzata di massa di a forma di e oggetti fragili
Con ricerca sul meccanismo di deformazione dei materiali flessibili, il gruppo di R & S a Pechino Soft Robot la Technology Company ha progettato una pinza di presa flessibile che può afferrare i pezzi in lavorazione delle dimensioni, delle forme e dei pesi differenti con una singola pinza di presa. La pinza di presa flessibile ha “dita” pneumatiche molli che possono avvolgere con elasticità l'oggetto dell'obiettivo senza la necessità di conoscere in anticipo la sue forma e dimensione esatte. Mentre il robot molle si compone dei materiali flessibili, l'azione commovente non danneggia alcun il pezzo in lavorazione, rendente lo particolarmente adatto a pezzi in lavorazione fragili o graffio-inclini.
| φb | 200 |
| Wn | 40 |
| Dn | 22-133 |
| Libbra | 68,2 |
| Lt | 62,7 |
| Ln | 59,5 |
| L | 35,5 |
| Smax | 9 |
| Ymax | 13 |
| gamma di dimensione del pezzo in lavorazione | 22-151 |
| carico (g) | 2070 |
| peso del prodotto (g) | 543 |
| pressione di esercizio massima | 100kPa |
| vita del prodotto | 300w |
![]()
Persona di contatto: Miss. wang
Telefono: +8618651125686