
|
Dettagli:
|
| Weight/G: | 186,6 | Applicazione: | Industria di automobile, foodindustry, 3C, medico |
|---|---|---|---|
| Evidenziare: | Dito robot molle di FDA,Dito robot molle degli oggetti fragili,Dito molle del robot di FDA |
||
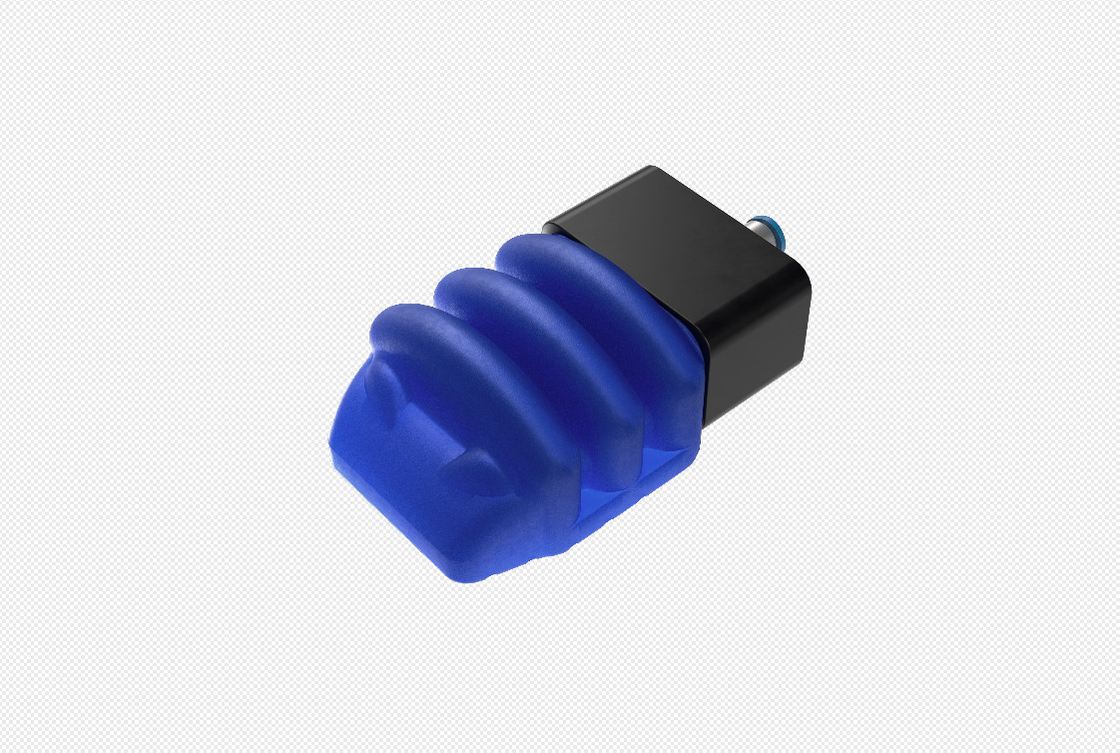
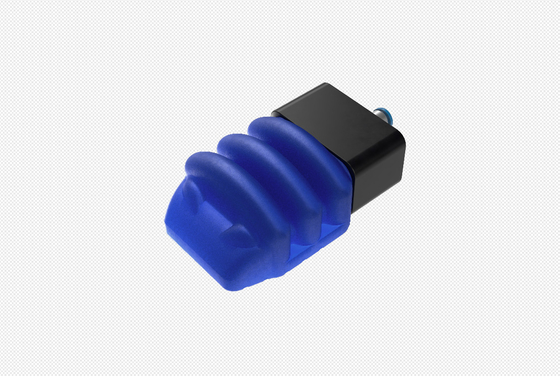
Dito elastico del robot di N6064+highly material+soft
Dita molli del robot per la presa degli oggetti fragili e delicati
Secondo la federazione internazionale di robotica (IFR), l'industria globale ha risolto soltanto il problema di una manipolazione automatizzata di produzione di 3%-4% degli oggetti rigidi regolari, con il 96% rimanente degli oggetti flessibili, a forma di e fragili ancora che sono caricati e scarichi manualmente.
Le dita molli del robot sono fatte di materiale flessibile e possono afferrare tutti i tipi di oggetti fragili e a forma di senza l'esigenza della preregistrazione alle dimensioni fini dell'oggetto. Può essere utilizzato nelle catene d'imballaggio automatiche delle linee di produzione del gelato, per i prodotti congelati, nelle catene di imballaggio automatiche per le palle di pesce, in alimento fresco che ordinano le linee, ecc.
| W/mm | 60 | |
| L/mm | 64 | |
| Ln/mm | 94,7 | |
| T/mm | 38 | |
| X/mm | 0 | |
| A/mm | 53,5 | |
| B/mm | 30,5 | |
| Smax/mm | 31 | |
| Ymax/mm | 40 | |
| weight/g | 186,6 | |
| punta delle dita thrust/N | 25 | |
| coefficiente del carico di diverso finger/g | verticale | 750 |
| pacchetto | 1750 | |
| velocità di lavoro/CPM | <110> | |
![]()
Persona di contatto: Miss. wang
Telefono: +8618651125686