
|
Dettagli:
|
| Evidenziare: | Dito robot molle di brevetto straniero,Dito robot molle di brevetto domestico,Dito robot del CE |
||
|---|---|---|---|
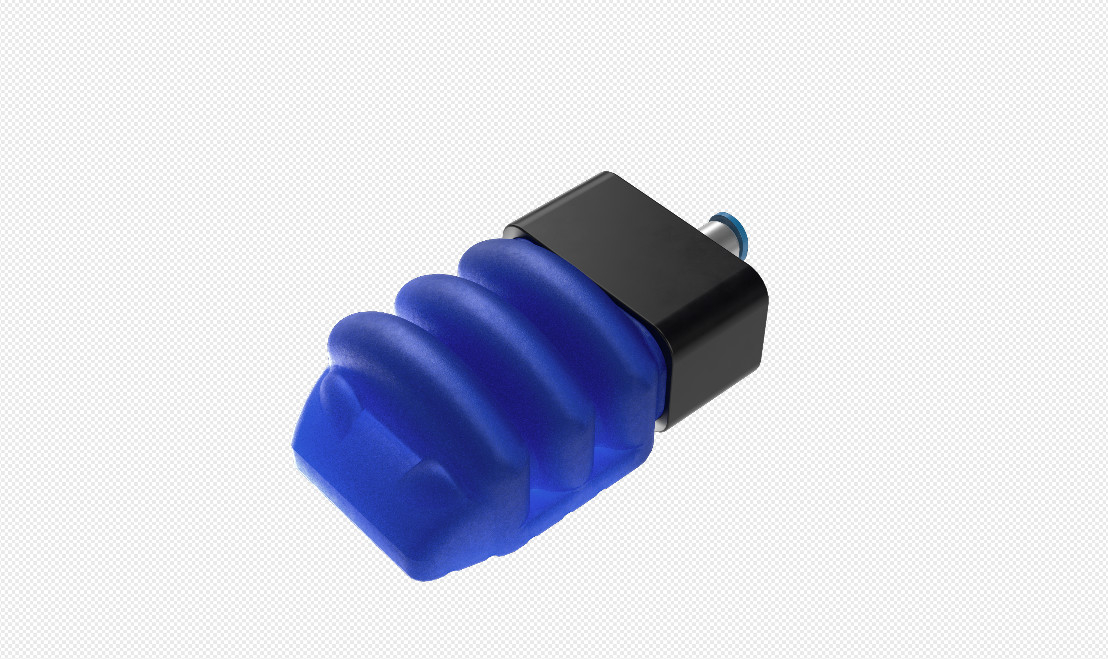
N5056 + brevetti domestici e stranieri + dita molli del robot
Dita molli del robot che interrompono la tecnologia commovente flessibile
Il mercato di automazione industriale si è evoluto al punto in cui pesante, lavoro manuale semplice è stato risolto dalle soluzioni provate. Le sfide hanno andato per la sostituzione della macchina di lavoro manuale ora sono messe a fuoco sull'elaborazione automatizzata degli oggetti a forma di e fragili di multi-categoria. Limitato dalla mancanza di dispositivi di pressione flessibili, questi oggetti possono essere caricati e scaricati soltanto manualmente, notevolmente limitando la capacità di produzione del produttore ed aumentando i costi.
Infatti, questo è un problema comune nell'industria globale e non c'è stato soluzione matura in Cina o all'estero a lungo. In risposta a questi bisogni, SRT ha sviluppato un dito flessibile del robot per risolvere il problema su scala industriale di caricamento e dello scarico automatizzati degli oggetti a forma di e fragili ed ha stato bene alla prima società in Cina per sviluppare e produrre una pinza di presa flessibile.
| W/mm | 50 | |
| L/mm | 56 | |
| Ln/mm | 81,5 | |
| T/mm | 33,5 | |
| X/mm | 1,5 | |
| A/mm | 48 | |
| B/mm | 27 | |
| Smax/mm | 20 | |
| Ymax/mm | 31 | |
| weight/g | 121,2 | |
| punta delle dita thrust/N | 17 | |
| coefficiente del carico di diverso finger/g | verticale | 670 |
| pacchetto | 1300 | |
| velocità di lavoro/CPM | <110> | |
| vita/periodo del prodotto | >300W | |
| pressione di esercizio | -60~100kPa | |
| Diametro del collegamento | 6mm | |
![]()
Persona di contatto: Miss. wang
Telefono: +8618651125686