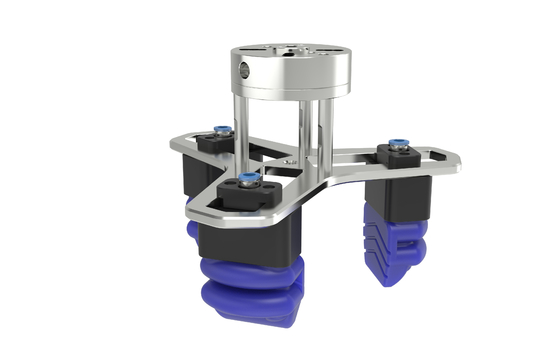
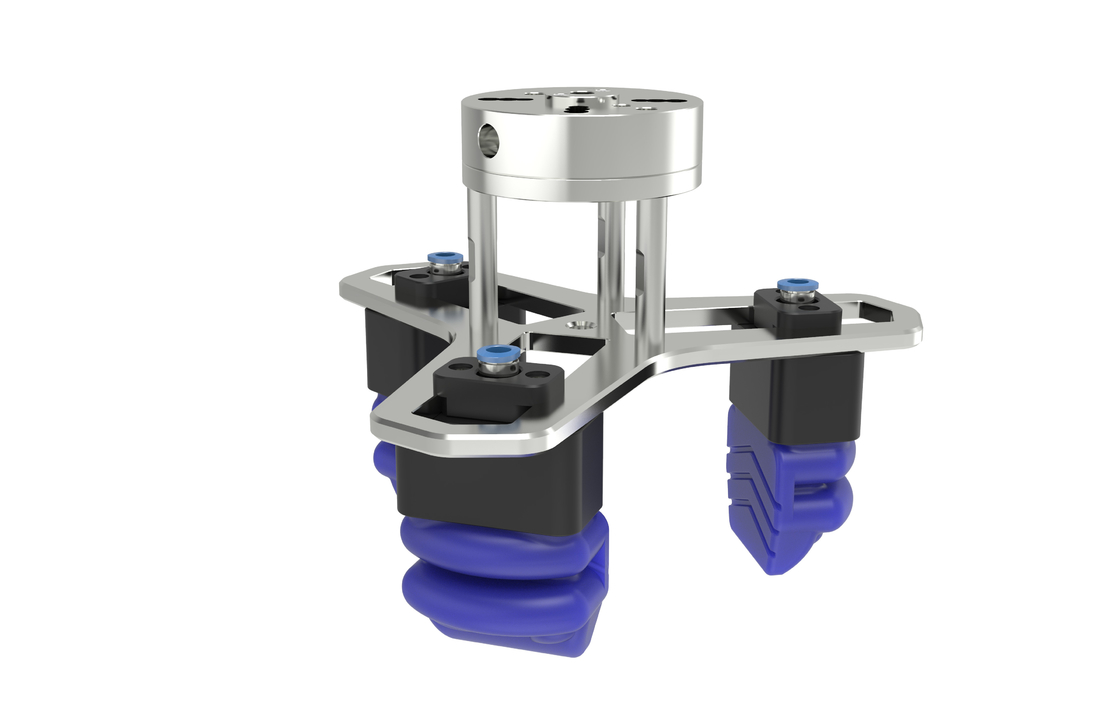
SFG-FNC3-N5041 + controllabilità + pinza di presa molle del robot
Pinza di presa molle del robot che può afferrare dozzine di oggetti delle forme e delle dimensioni differenti
Il punto culminante della progettazione delle dita molli del robot è la palma mobile (pochi ricercatori hanno progettato la palma della pinza di presa per essere mobili). Nella carta, i ricercatori indicano che con la palma mobile, il dito molle del robot può afferrare dozzine di oggetti delle forme e delle dimensioni differenti e fino ad un peso massimo di 3 chilogrammi, facendo uso soltanto del controllo commovente ad anello aperto. Inoltre, la pinza di presa flessibile ha stabilità commovente eccellente, con gli oggetti che rimangono afferrati saldamente senza cadere quando il braccio robot si muove ad un'accelerazione di 15m/s^2.
| φb | 200 |
| Wn | 50 |
| Dn | 28-134 |
| Libbra | 68,2 |
| Lt | 62,7 |
| Ln | 66 |
| L | 40,5 |
| Smax | 12 |
| Ymax | 17 |
| gamma di dimensione del pezzo in lavorazione | 28-158 |
| carico (g) | 3600 |
| peso del prodotto (g) | 633 |
| pressione di esercizio massima | 100kPa |
| vita del prodotto | 300w |
![]()
I nostri prodotti sono venduti in tutto il mondo. Puoi stare certo dell'intero processo dei nostri prodotti.